#include <linux/module.h>
#include <linux/hrtimer.h>
#include <linux/ktime.h>
#include <linux/sched.h>
#include <linux/signal.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#define DEVICE_NAME "my_hrtimer_device"
#define CLASS_NAME "my_hrtimer_class"
#define IOCTL_SET_PID _IOW('f', 1, pid_t*)
static struct hrtimer my_hrtimer;
static ktime_t kt_periode;
static struct class* my_hrtimer_class = NULL;
static struct device* my_hrtimer_device = NULL;
static dev_t dev_num;
static struct cdev my_cdev;
static pid_t user_pid = -1;
static struct task_struct *user_task = NULL;
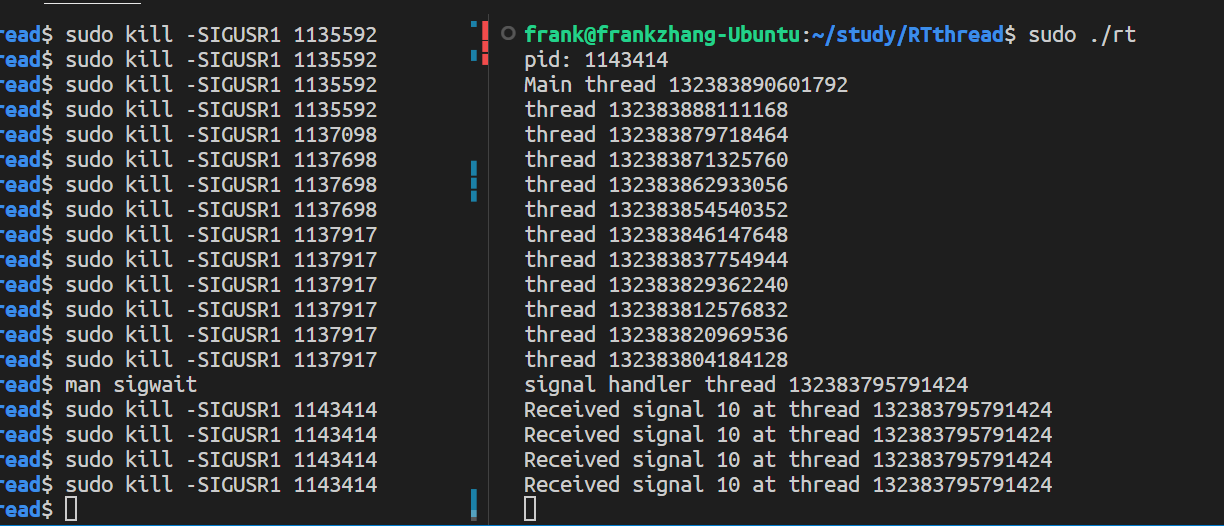
enum hrtimer_restart my_hrtimer_callback(struct hrtimer *timer) {
if (user_task) {
send_sig_info(SIGUSR1, SEND_SIG_PRIV, user_task);
}
hrtimer_forward_now(timer, kt_periode);
return HRTIMER_RESTART;
}
static long my_ioctl(struct file *file, unsigned int cmd, unsigned long arg) {
switch (cmd) {
case IOCTL_SET_PID:
if (copy_from_user(&user_pid, (pid_t __user *)arg, sizeof(user_pid))) {
return -EFAULT;
}
user_task = pid_task(find_vpid(user_pid), PIDTYPE_PID);
if (!user_task) {
return -ESRCH;
}
printk(KERN_INFO "Received PID: %d\n", user_pid);
break;
default:
return -ENOTTY;
}
return 0;
}
static struct file_operations fops = {
.unlocked_ioctl = my_ioctl,
};
static int __init my_hrtimer_init(void) {
int ret;
printk(KERN_INFO "Initializing hrtimer module.\n");
ret = alloc_chrdev_region(&dev_num, 0, 1, DEVICE_NAME);
if (ret < 0) {
printk(KERN_ERR "Failed to allocate char device region\n");
return ret;
}
cdev_init(&my_cdev, &fops);
ret = cdev_add(&my_cdev, dev_num, 1);
if (ret < 0) {
unregister_chrdev_region(dev_num, 1);
printk(KERN_ERR "Failed to add char device\n");
return ret;
}
my_hrtimer_class = class_create(CLASS_NAME);
if (IS_ERR(my_hrtimer_class)) {
cdev_del(&my_cdev);
unregister_chrdev_region(dev_num, 1);
printk(KERN_ERR "Failed to create class\n");
return PTR_ERR(my_hrtimer_class);
}
my_hrtimer_device = device_create(my_hrtimer_class, NULL, dev_num, NULL, DEVICE_NAME);
if (IS_ERR(my_hrtimer_device)) {
class_destroy(my_hrtimer_class);
cdev_del(&my_cdev);
unregister_chrdev_region(dev_num, 1);
printk(KERN_ERR "Failed to create device\n");
return PTR_ERR(my_hrtimer_device);
}
kt_periode = ktime_set(0, 1000000000);
hrtimer_init(&my_hrtimer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
my_hrtimer.function = my_hrtimer_callback;
hrtimer_start(&my_hrtimer, kt_periode, HRTIMER_MODE_REL);
return 0;
}
static void __exit my_hrtimer_exit(void) {
int ret;
ret = hrtimer_cancel(&my_hrtimer);
if (ret) {
printk(KERN_INFO "Timer was still in use.\n");
}
device_destroy(my_hrtimer_class, dev_num);
class_destroy(my_hrtimer_class);
cdev_del(&my_cdev);
unregister_chrdev_region(dev_num, 1);
printk(KERN_INFO "Exiting hrtimer module.\n");
}
module_init(my_hrtimer_init);
module_exit(my_hrtimer_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Frank");
MODULE_DESCRIPTION("A simple hrtimer example module with signal to wake up user process");
|
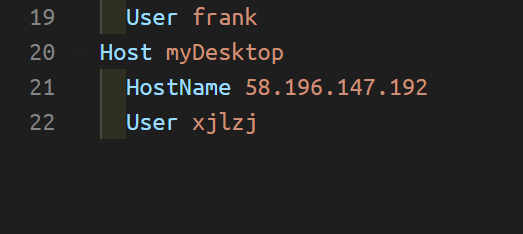 和系统的ssh known-hosts文件都不能解决问题,需要在vscode的
和系统的ssh known-hosts文件都不能解决问题,需要在vscode的